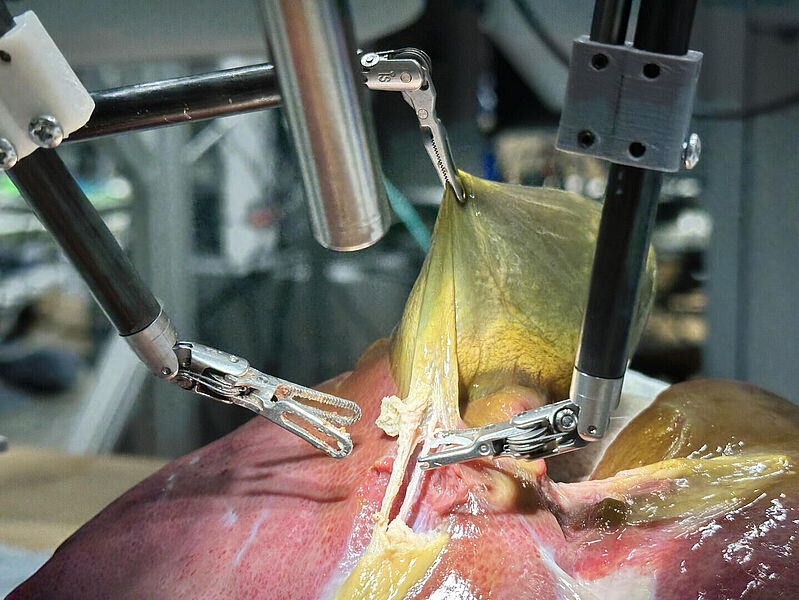
Ein Forschungsteam der Johns Hopkins University hat einen chirurgischen Roboter entwickelt, der erstmals eigenständig eine komplexe Phase einer Gallenblasenoperation an einem lebensechten Modell durchgeführt hat – ohne menschliche Unterstützung. Der sogenannte Surgical Robot Transformer-Hierarchy (SRT-H) nutzte dabei maschinelles Lernen und reagierte auf gesprochene Kommandos wie ein angehender Chirurg im Austausch mit einem Mentor.
Von der Aufgabe zur echten Entscheidungsfindung
Im Gegensatz zu bisherigen Robotersystemen, die vorprogrammierte Aufgaben ausführen, trifft SRT-H selbstständig Entscheidungen in Echtzeit, erkennt anatomische Strukturen individuell, korrigiert sich selbst und passt sich unvorhergesehenen Situationen an – vergleichbar mit erfahrenen Chirurginnen und Chirurgen.
«Dieses Fortschritt bewegt uns von Robotern, die bestimmte chirurgische Aufgaben ausführen, hin zu Robotern, die chirurgische Eingriffe wirklich verstehen», erklärt Axel Krieger, medizinischer Robotik-Experte an der Johns Hopkins University. «Das bringt uns wesentlich näher an klinisch einsetzbare autonome chirurgische Systeme.»
Sprachgesteuert, lernfähig, präzise
Das System basiert auf derselben Architektur wie ChatGPT und nutzt sogenannte Imitationslernverfahren. Trainiert wurde der Roboter anhand von Operationsvideos, unterstützt durch beschreibende Untertitel. In den Versuchen operierte SRT-H mit 100 Prozent Genauigkeit, auch unter variierenden anatomischen Bedingungen und bei plötzlichen Änderungen, etwa durch blutähnliche Farbstoffe oder veränderte Startpositionen.
Ji Woong «Brian» Kim, Erstautor und ehemaliger Postdoc an der Johns Hopkins University (heute Stanford), sagt: «Unsere Arbeit zeigt, dass KI-Modelle verlässlich genug für chirurgische Autonomie sein können – etwas, das früher weit entfernt schien, aber jetzt nachweislich realistisch ist.»
Perspektive: Vollständig autonome Eingriffe
In Zukunft soll das System auf weitere Operationstypen ausgeweitet werden. Ziel ist ein vollständig autonomes chirurgisches Assistenzsystem, das präzise, sicher und lernfähig ist – auch in unstrukturierten klinischen Situationen.
Die Ergebnisse der Studie wurden im Fachjournal Science Robotics veröffentlicht:
Ji Woong (Brian) Kim, Juo-Tung Chen, Pascal Hansen, Lucy Xiaoyang Shi … Chelsea Finn, Axel Krieger et al.: «SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning», in: «Science Robotics», Juli 2025. Doi: 10.1126/scirobotics.adt5254